![]()
画像センサ
- 画像センサカメラ
- アプリケーション事例
- ピストンの位置決め(ロボットピッキング用途)
- ご購入前ご相談窓口
- Webでお問い合わせ/お見積依頼/資料請求
アプリケーション事例
ピストンの位置決め(ロボットピッキング用途)
-
-
機械部品分野 検査項目 位置計測 検査素材 金属 - ピストン頭部を検査してピッキングのための位置決め
使用する画像処理機能
SFサーチⅢモジュール
予め登録したモデル画像と形状パターン(エッジ情報)が合致する画像を計測領域から検出します。
距離角モジュール
画像処理機能で計測される各種座標値(中心、重心、エッジ位置など)を使って、2点間の距離や3点を結んだ直線で作られる角度などを計測する機能です。
![]()
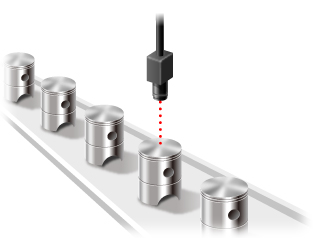
- 位置検査
コンベア上を流れてきた「ピストン」をロボットでピッキング。
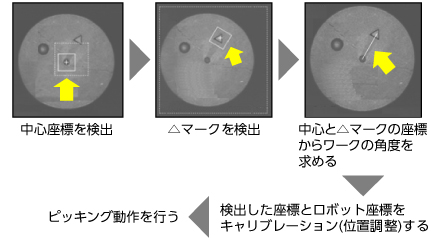
- 1.
- SFサーチⅢモジュール でピストンの中心座標、△マークの座標を検出。
- 2.
-
距離角モジュール で2つの座標からワークの角度を計算。
- *画像はイメージです。